Motors And Encoders¶
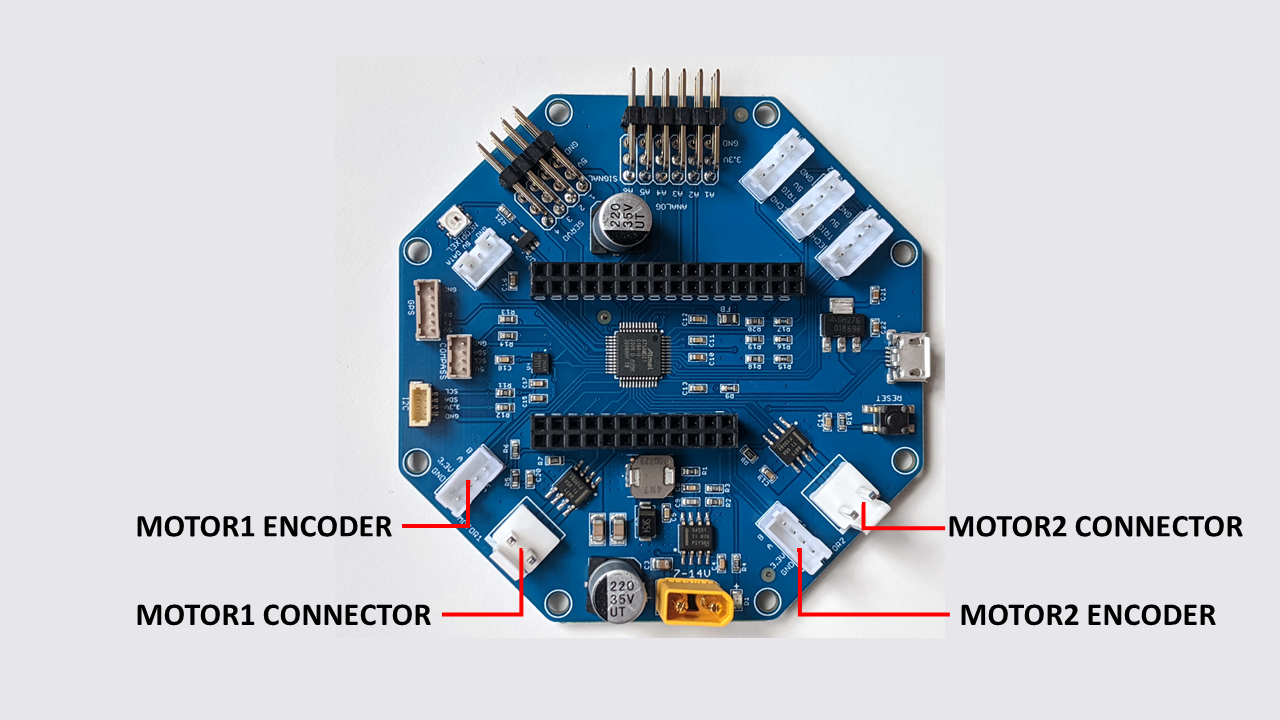
RoverWing motor connectors
The RoverWing provides connections for two brushed DC motors, at the same voltage as the main power supply (7-14V). You can also use motors rated for lower voltage and limit the power in software: for example, you can use 6V motors with 7.4V power supply by limiting the maximal output power to 80%. Each motor is controlled by DRV8871 motor driver by Texas Instruments, which can provide up to 2.9A per motor. The drivers are current limited, so the current will not exceed 2.9A even if the motor is stalled, which helps prevent driver overheating. The motor ports use JST VH connectors; see section Cables for list of compatible cables and adapters.
To avoid overheating, it is recommended to attach additional heatsinks to the motor drivers if you intend to run the motors at more than 1.5A continuous.
In addition, the RoverWing provides two ports for connecting quadrature encoders, one for each motor. The encoder ports use JST PH4 connectors, and pin order is shown below:
- Ground (pin closest to board edge)
- 3.3V
- Channel A
- Channel B
These are the same connectors and pinouts as used by REV Robotics hubs, so one can use the same encoder cables. For other suggested cables, see Cables section.
Warning
RoverWing provides 3.3V for the encoders. Some encoders require 5V or higher, so they won’t work with RoverWing. Please check the specs of your encoders before starting your build!